有限公司")


有限公司")
有限公司")
有限公司")
有限公司")

机器人覆盖率检测实验室以下简称实验室。本方案包括三大部分:实验室建设(包括房间搭建、家具及其布局等);测试硬件部分;测试软件部分。
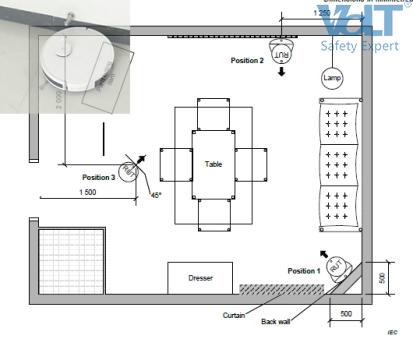
实验室为长4000mm、宽5000mm(公差+-50mm)的地面、四周墙面和天花板组成。实验室需包含该房间的建设以及家具的制造与安装。
| 名称 | 数量 | 作用 |
| 摄像头 | 2 | 用于视觉跟踪 |
| 摄像头固定支架 | 2 | 用于摄像头安装固定 |
| 校准器(跟踪器) | 4 | 图像校准与测试使用 |
| 校准器充电器 | 1 | 用于校准器充电 |
| USB延长线 | 2 | 远距离图像传输 |
| USB集线器 | 1 | 多USB接口 |
| 无源USB信号放大器 | 2 | 用于信号增强 |
| 笔记本(或台式机) | 1 | 软件运行环境 |
1 软件产品基本要求:
a) 功能应满足IEC62929-7标准,IEC 62885-7 CD
b) 系统成熟可靠,在2家机器人工作组实验室和1家第三方检测机构有1年以上的成功应用经验。
2 性能指标:
a) 双目摄像头需支持1080p,软件对位置的分辨率<=5cm;
b) 软件对双目摄像头的采样率>=30HZ;
c) 软件识别后位置准确度<=5cm,即房间内任意两点之间的实际测量值与测试系统给出的值,误差在5CM范围内;
d) 路径曲线平滑度需具备反锯齿特性。
3 功能指标:
a) 支持三个位置测试,一个位置对应一个测试报告;
b) 自定义房间布局图,可方便用于研发测试;
c) 一键进行覆盖率检测,不需要人为干预,期间若机器人卡住或停止,需报警提示;
d) 实时描绘机器人运行轨迹,并标注当前机器人运行位置;
e) 需实时给出机器人测试过程中的最大运行速度与平均速度;
f) 整个测试过程需录制回放视频,便于工程师分析机器人导航算法;可实现一键导出excel报告,报告需给出测试过程中1-5次覆盖率图与覆盖率曲线。
手机:13771972280
电话:0512-62986512 / 0512-62986522
邮箱:service@volt-china.com
地址:苏州工业园区通园路199号联发工业园区6栋2F
座机电话:0512-62986512 / 0512-62986522 传真:0512-62986532
公司地址:苏州工业园区通园路199号联发工业园区6栋2F
邮 箱:service@volt-china.com COPYRIGHT © 2016 VOLT-CHINA.COM 沃尔特电子(苏州)有限公司
苏ICP备16062383号